So, the prototype is working. Not very beautiful, and the soldering sucks, but it works and it spares me from putting a breadboard in the boat again. Below the circuit board is the Arduino Mega which is currently operating as the test platform, on top of it are the MRF24J40MA wireless module and the Adafruit Ultimate GPS receiver.
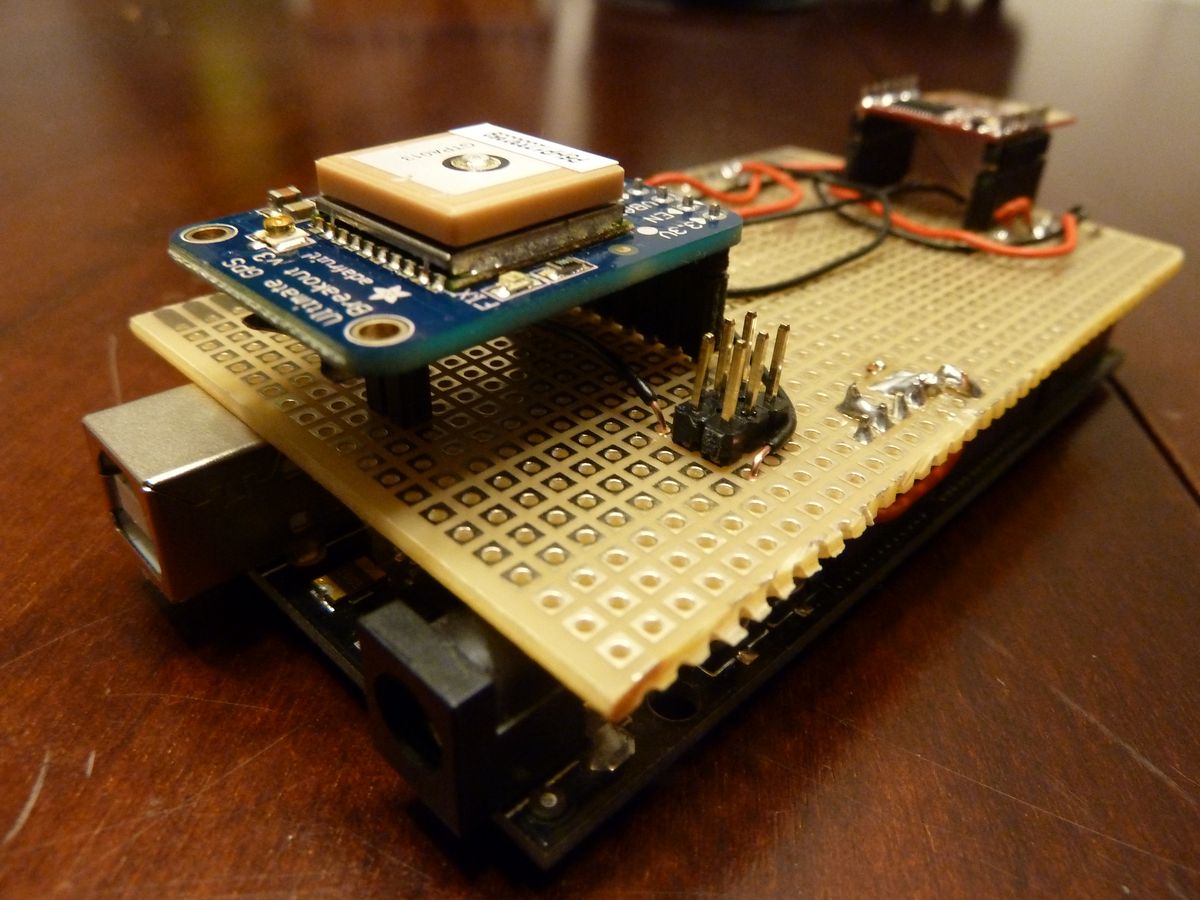

Now I only have to build something similar for the bluetooth bridge, make some adjustments to the software and I’m good to run another life test on a lake (without having to fear that the boat wanders out of bluetooth range).
Screenshot from Amarino monitoring the GPS transmission from the prototype:

Not quite sure where the “y” at the end of the line comes from, but the rest says:
1: have a fix, 1: quality okay, 49,421465N,8,387895E, speed 0.02 knots, orientation 51.43°, 6 satellites visible.
The position is still about 60km off though.
Nice work Gerald, hope everything goes well on the future stages of the project! I found out about your blog on a tweet from Adafruit, and I’d just like to ask a question to see if I got the idea right, do you still need the wireless bridge (RF+Bluetooth module) to communicate the phone and the controlling Arduino? I mean, is there no way of leaving it apart and still use Bluetooth communication? Thanks for the information mate, greatly appreciated!
Greetings from Mexico. Good luck!
On the first tries I used bluetooth only, but the range is limited to the point to make it useless. The typical bluetooth device is usually class 3, which has a range of about 10m. Class 1 has a range of up to 100m, but as far as I know both endpoints have to be in that class to get the full range. It is not difficult to get your hand on a class 1 bluetooth module, and they don’t cost much more, but that doesn’t help if the phone is only class 3. So the whole point of the wireless bridge is to extend the bluetooth range and still be able to connect it to different control devices.
Hi there, it’s fortunate for me to find someone doing what I am planning to do. From what I have read from your blog, you are making a gps-based automated boat which I guess I could use a lot of your help.(thank you in advance).
I am about to make an android-phone-remote-controlled hovercraft, but I have only limited programming skills and electronic knowledge. The hovercraft should be using 2 motors which enables left/right turns and forward movement.
What I have learned from your blog is that the bluetooth transmitter on cellphones only has a range of 10 meters. This is obviously not enough range for a RC boat(I need at least 100 meters or so). I was wondering what is your solution to it.
Oh, I have not yet purchased an arduino kit since I don’t know exactly what components I need for my application. Any ideas? I would like to buy everything(if possible) from Adafruit.
Thanks for your help and time! Great work btw!
Feel free to email me!
Hi,
my solution to the range problem is featured in this post. It consists of an Arduino Nano, a Bluetooth module and a wireless transmitter with higher range, with a counterpart on the boat.
Everything about it is still in early development stages, especially the GPS part, so I doubt I can be of much help. I plan to look at the awesome ArduPilot project, and maybe use parts of its code.