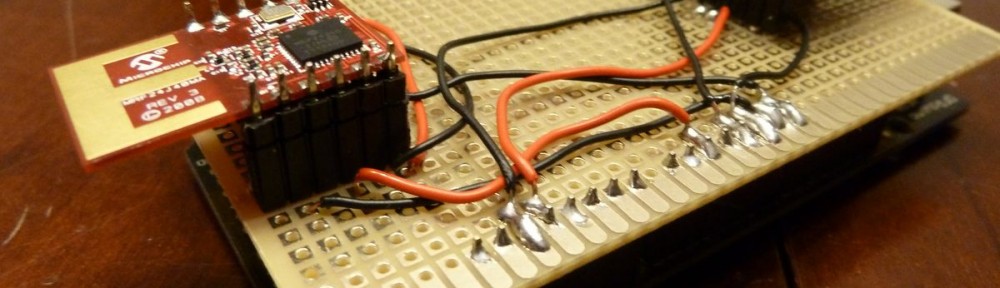
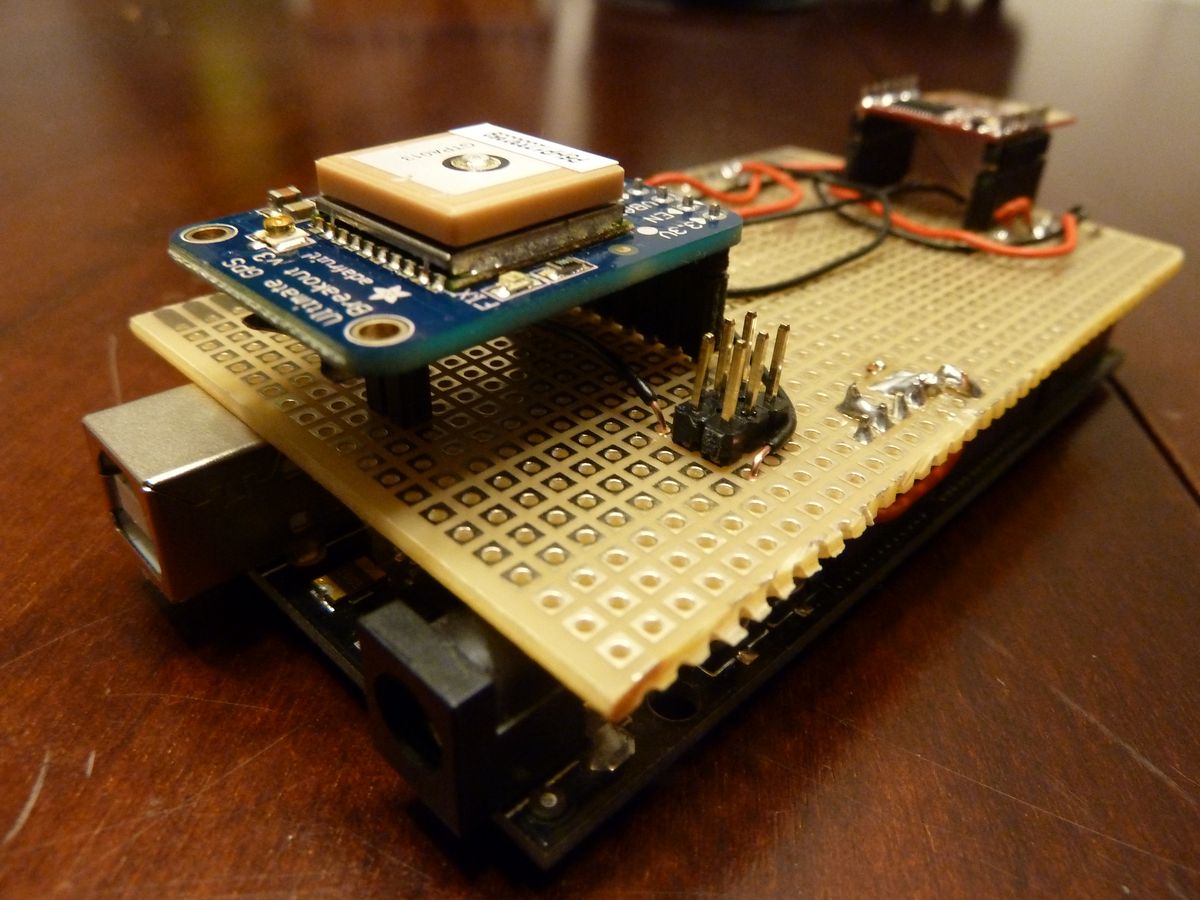
So, the prototype is working. Not very beautiful, and the soldering sucks, but it works and it spares me from putting a breadboard in the boat again. Below the circuit board is the Arduino Mega which is currently operating as the test platform, on top of it are the MRF24J40MA wireless module and the Adafruit Ultimate GPS receiver.
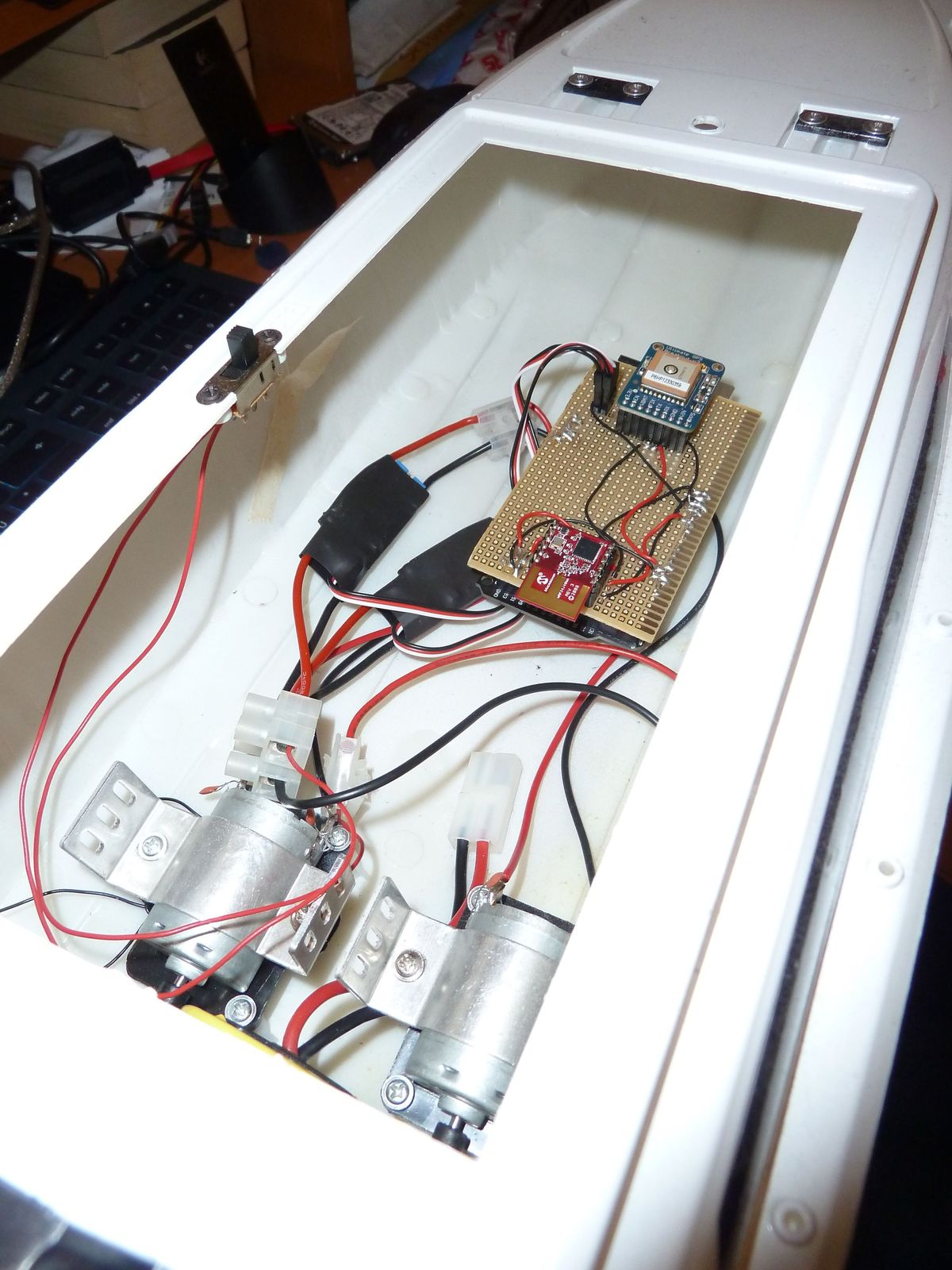

Now I only have to build something similar for the bluetooth bridge, make some adjustments to the software and I’m good to run another life test on a lake (without having to fear that the boat wanders out of bluetooth range).