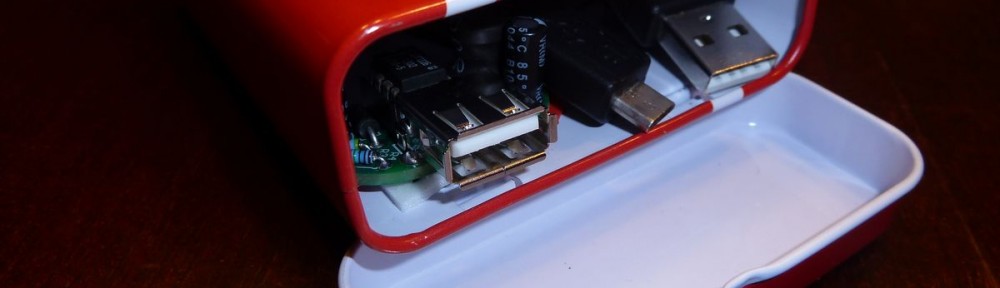
I got a MintyBoost Kit from Adafruit, and since the tins it is made for are not that widely available in Germany I searched for a different housing. I found a couple of metal cigarette boxes on amazon and decided on this version.
Tag: Adafruit
Void
Not much happening here right now, I tried various combinations to get the motors running, but to no avail. I tried motors on M1 + M2, M3 + M4, just to make sure it’s not a bad soldering joint. I tried piggybacking both L293 ICs to allow for a higher current. I tried the motors on M1 + M3, to spread the current of the two motors evenly. The result is always the same, more or less. The motors turn for a couple of seconds, then they stop. The ICs are becoming very hot, adding a heat sink doesn’t really help.
From what I gathered by reading through the adafruit support forum my best guess is that the motors need too much current for the ICs to handle. I can’t confirm this right now because the motors are not marked in any way, so I have no idea about their specifications. I ordered a new multimeter, currently I’m waiting for it to arrive. I hope I can do some helpful measuring when it’s here.
Pleasant surprise [Update]
Today I had a pleasant surprise in my mailbox:
 It took only four working days for my Motor Shield Kit to arrive in Germany after ordering it last Thursday from adafruit industries. Continue reading Pleasant surprise [Update]
It took only four working days for my Motor Shield Kit to arrive in Germany after ordering it last Thursday from adafruit industries. Continue reading Pleasant surprise [Update]
First tests for Android remote control
Over the last couple of days I worked on the basics to use my Android powered mobile phone as a remote control for my R/C boat. The first test covers reading the motion sensors of the phone (accelerometer specifically) and visualizing it. The result can be seen in this video:
Since it currently seems to be impossible to embed a YouTube video without it loading tracking scripts the video can only be viewed directly on YouTube.
I plan to steer the boat as one would control a vehicle in a game on the phone.
Some kind soul already mixed up an XBee module and a bluetooth module for Arduino to create a nice little module that can be used to control an Arduino from an Android device.
In other news, I ordered an motor control from Adafruit I want to use to control the motors of the boat. Can’t wait to start playing with it.